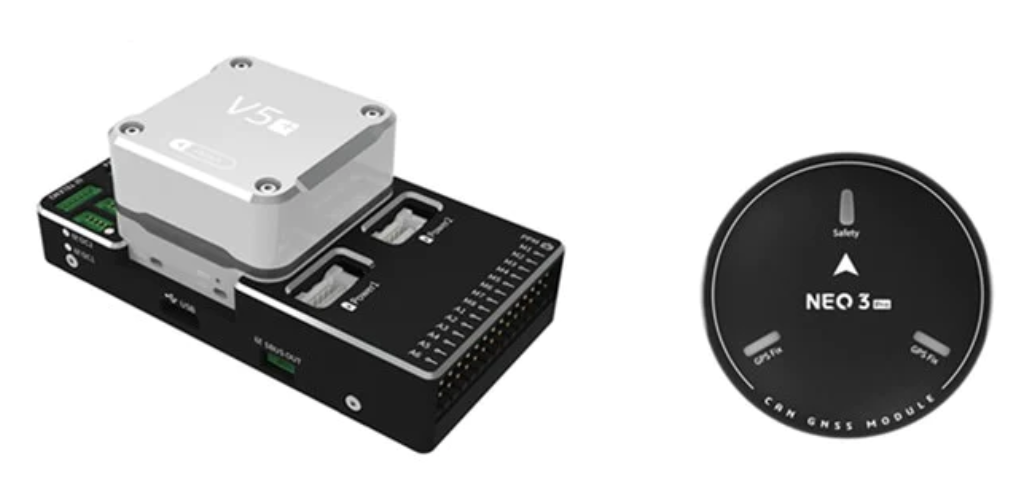
Польотний контролер CUAV Pixhawk flight control/With NEO3 Pro GPS/V5+
- Функціональність
- Програмне забезпечення: PX4 / Ardupilot
- Моделі: коптери, літаки, гелікоптери, VTOL'и, безпілотні машини, всюдиходи і т.д.
- Живлення: тристоронній вхід живлення
- Вага: 91 г
- Розміри: 85,5×42×33 мм
- Розміри: 85мм x 42мм x 33мм
Переглянути відгуки (0)






Польотний контролер CUAV Pixhawk flight control/With NEO3 Pro GPS/V5+
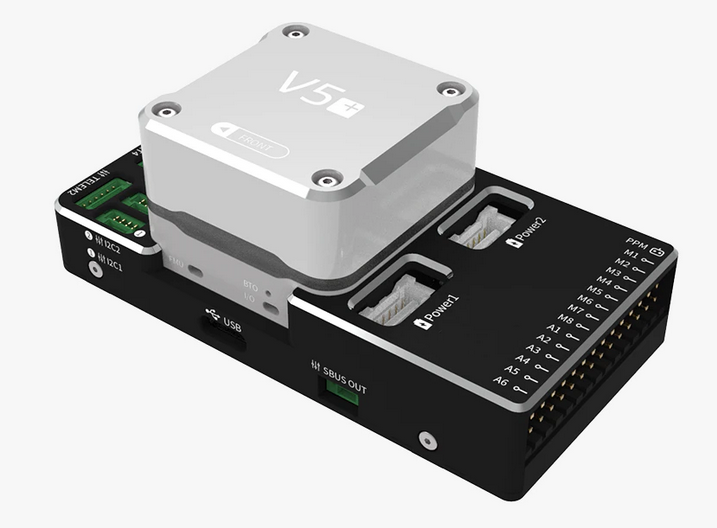
V5+ - політний контролер, заснований на стандарті Pixhawk FMUv5. Зовнішній інтерфейс використовує стандартні висновки Pixhawk, а модульна конструкція дозволяє користувачам створювати власні плати-носії. Сумісний з прошивками PX4 та ArduPilot.
Політний контролер має набір із 5 датчиків: 3 IMU модулі (ICM-20689, ICM-20602 та BMI055), компас IST8310 та барометр MS5611. Блок сенсорів, відокремлений від головної плати, спроектований з високоефективною системою демпфування, щоб забезпечити стабільну роботу навіть у складних умовах навколишнього середовища.
Підтримує підключення RTK модуля (до комплекту не входить), що дозволить досягти точності позиціонування до сантиметра.
Специфікація
Апаратне забезпечення
Процесор: STM32F765 (32-бітовий Arm Cortex-M7, 216 МГц, 2 Мб флеш-пам'яті, 512 Кб оперативної пам'яті)
Співпроцесор: STM32F100 (32-бітовий Arm Cortex-M3, 24 МГц, 8 Кб оперативної пам'яті)
Інтерфейс
UART: 5
I2C: 4
SPI: 1
CAN: 2
АЦП (ADC): 2
Вихід PWM: 14
Вхід PWM: 6
Вхід PPM: 1
DSM/SBUS/RSSI: 1
Power1: 1
Запобіжник: 1
Буззер: 1
USB Type-C: 1
вмхід під MicroSD: 1