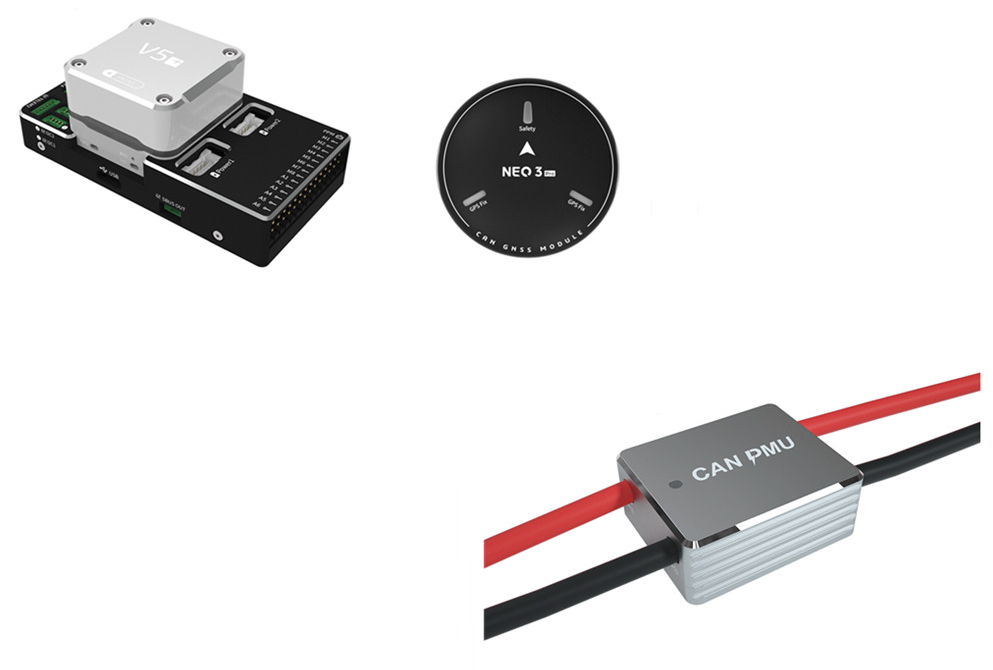
Контролер польоту CUAV V5+ із GPS-модулем NEO 3 для FVP RC Drone Quadcopter
Переглянути відгуки (0)






Контролер польоту CUAV V5+ із GPS-модулем NEO 3 для FVP RC Drone Quadcopter OMD
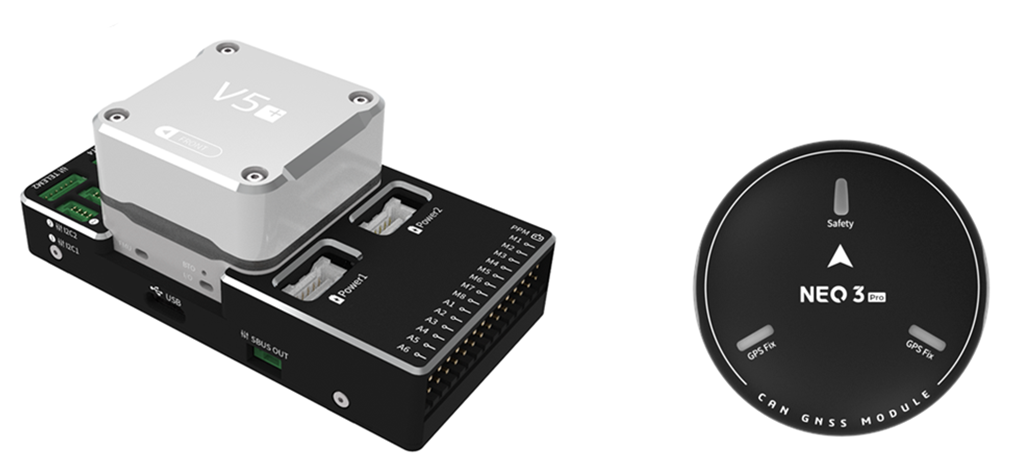
Польотний контролер CUAV V5+ - це вдосконалений автопілот виробництва CUAV. Плата заснована на стандарті дизайну Pixhawk FMUv5, зовнішній інтерфейс використовує стандартні розпіновки Pixhawk, а модульна конструкція дає змогу користувачам налаштовувати свою власну несучу плату. Автопілот сумісний із прошивками PX4 і ArduPilot. CUAV V5+ ідеально підходить для наукових досліджень та інтеграції комерційних систем. У комплекті поставляється GPS NEO V2.
Основний процесор FMU: STM32F765
32 Bit Arm® Cortex®-M7, 216 МГц, 2 МБ пам’яті, 512 КБ RAM
Процесор вводу-виведення: STM32F100
32 Bit Arm® Cortex®-M3, 24 МГц, 8 КБ SRAM
Акселерометр/гіроскоп: ICM-20689
Акселерометр/гіроскоп: BMI055
Магнітометр: IST8310
Барометр: MS5611
8-14 ШІМ-виходів (6 від IO, 8 від FMU)
3 виділені входи ШІМ/захоплення на FMU
Спеціальний вхід ПДУ для CPPM
Виділений вхід ПДУ для PPM і
аналоговий вхід S.Bus / ШІМ RSSI Вихід
S.Bus
5 послідовних портів загального призначення
4 порти I2C
4 шини SPI
2 шини CAN з послідовним ESC
Аналогові входи для напруги/струму 2 батарей