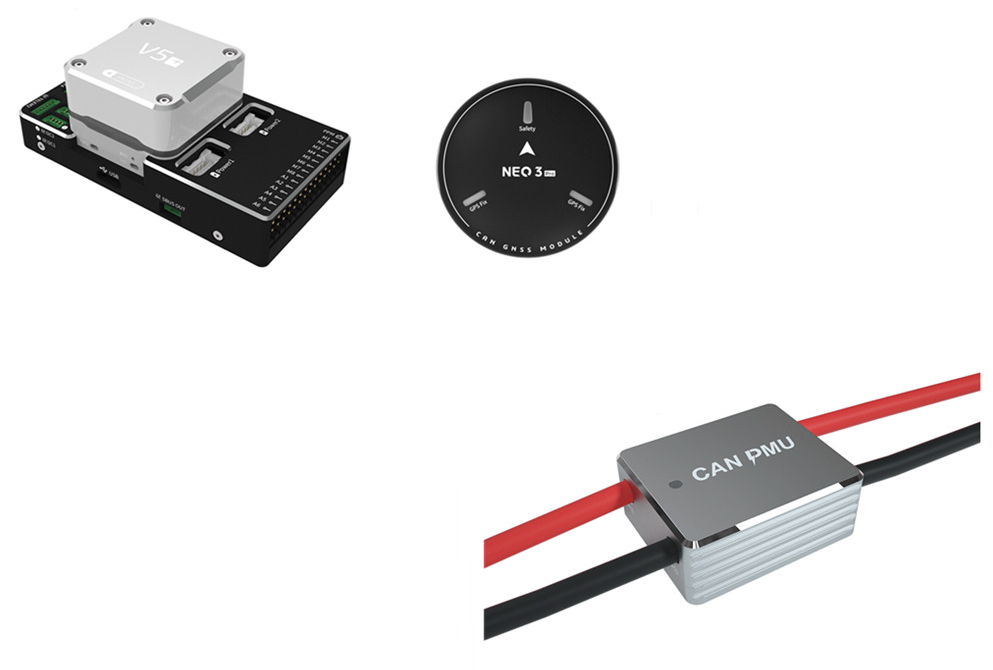
CUAV V5+ flight controller with NEO 3 GPS module for FVP RC Drone Quadcopter
Переглянути відгуки (0)






CUAV V5+ flight controller with NEO 3 GPS module for FVP RC Drone Quadcopter OMD
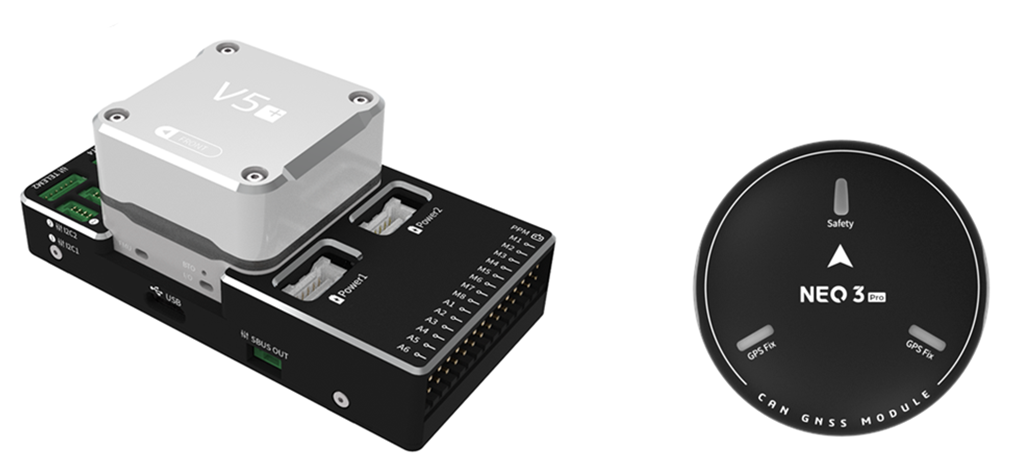
The CUAV V5+ flight controller is an advanced autopilot manufactured by CUAV. The board is based on the Pixhawk FMUv5 design standard, the external interface uses standard Pixhawk pinouts and the modular design allows users to configure their own carrier board. The autopilot is compatible with PX4 and ArduPilot firmware. The CUAV V5+ is ideal for scientific research and commercial system integration. A GPS NEO V2 is included.
FMU main processor: STM32F765
32 Bit Arm® Cortex®-M7, 216 MHz, 2 MB memory, 512 KB RAM
I/O processor: STM32F100
32 Bit Arm® Cortex®-M3, 24 MHz, 8 KB SRAM
Accelerometer/gyroscope: ICM-20689
Accelerometer/gyroscope: BMI055
Magnetometer: IST8310
Barometer: MS5611
8-14 PWM outputs (6 from IO, 8 from FMU)
3 dedicated PWM/capture inputs per FMU
Dedicated remote control input for CPPM
Dedicated remote control input for PPM and
S.Bus analog input / PWM RSSI output
S.Bus
5 general purpose serial ports
4 I2C ports
4 SPI buses
2 CAN buses with serial ESC
Analog inputs for voltage/current of 2 batteries