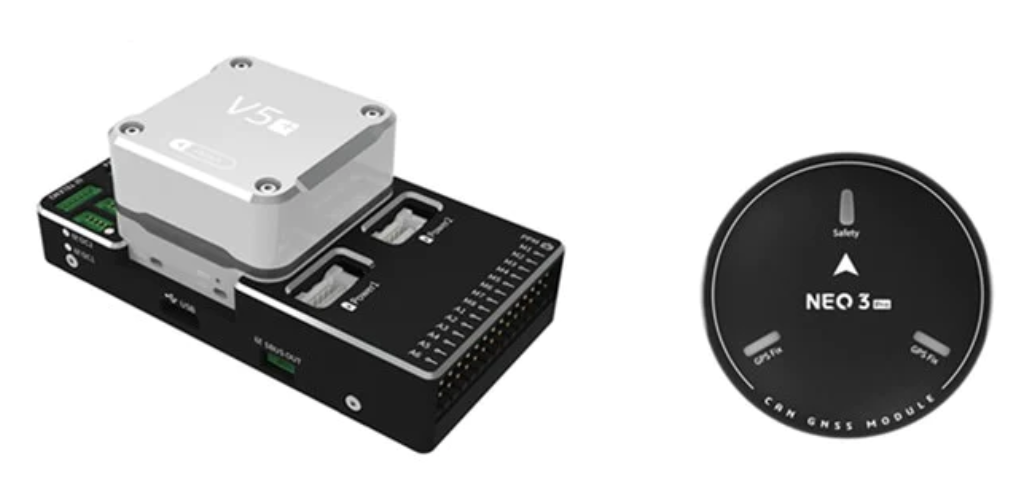
CUAV Pixhawk flight control/With NEO3 Pro GPS/V5+ Polo Controller
- Functionality.
- Software: PX4 / Ardupilot
- Models: copters, airplanes, helicopters, VTOLs, unmanned vehicles, all-terrain vehicles, etc.
- Power supply: three-way power input
- Weight: 91 g
- Dimensions: 85.5×42×33 mm
- Size: 85mm x 42mm x 33mm
Переглянути відгуки (0)






CUAV flight controller Pixhawk flight control/With NEO3 Pro GPS/V5+
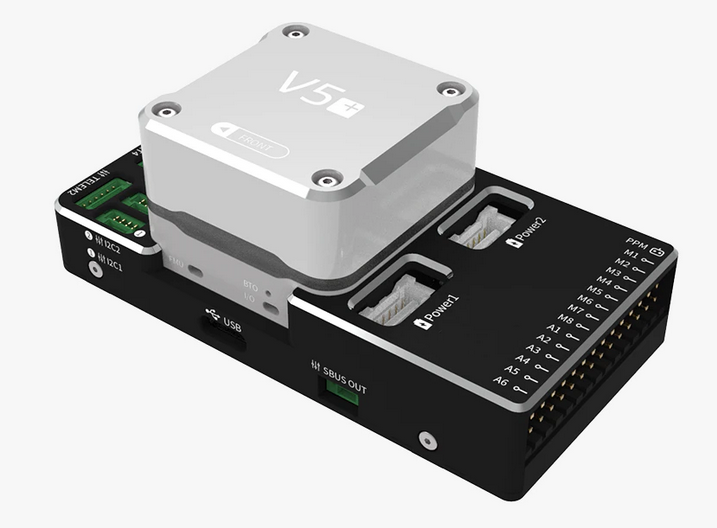
V5+ is a flight controller based on the Pixhawk FMUv5 standard. The external interface uses standard Pixhawk pins, and the modular design allows users to create their own carrier boards. It is compatible with PX4 and ArduPilot firmware.
The flight controller has a set of 5 sensors: 3 IMU modules (ICM-20689, ICM-20602, and BMI055), IST8310 compass, and MS5611 barometer. The sensor unit, separated from the main board, is designed with a highly efficient damping system to ensure stable operation even in harsh environments.
It supports the connection of an RTK module (not included), which will allow you to achieve positioning accuracy up to a centimeter.
Specifications
Hardware.
Processor: STM32F765 (32-bit Arm Cortex-M7, 216 MHz, 2 MB flash memory, 512 KB RAM)
Coprocessor: STM32F100 (32-bit Arm Cortex-M3, 24 MHz, 8 KB of RAM)
Interface
UART: 5
I2C: 4
SPI: 1
CAN: 2
ADC: 2
PWM output: 14
PWM input: 6
PPM input: 1
DSM/SBUS/RSSI: 1
Power1: 1
Fuse: 1
Buzzer: 1
USB Type-C: 1
MicroSD input: 1